
2016 nagyon sikeres év lett számunkra, hiszen június 28. és július 4. között a Rescube-csapat nemcsak elsőként képviselhette hazánkat a RoboCup Világbajnokság Mentőrobot-ligájában, de a szakmai tapasztalaton túl komoly díjakat és sikereket könyvelhettünk el:
RoboCup Design Award (RoboCup Tervezői Díj) a Flower Robotics-től
A japán Flower Robotics mint a 2016-os RoboCup Világbajnokság egyik fő szponzora a rendezvény valamennyi csapata és robotja közül a miénket találta a legjobban megalkotott gépnek (ez közel 500 robotot jelent!). Ez az elismerés amolyan konstruktőri díj, amelyet egy soktagú bizottság a leadott dokumentációk, személyes interjú és a robot megtekintése után ítélt csapatunknak. Külön kiemelték, hogy kreativitással közelítjük meg a problémákat, és egyedülálló gépünket teljesen önállóan építettük, nem sablonok vagy megszokások vezették döntéseinket, de a csapat önszerveződő – mérnöki kihívásokat kereső – volta is szimpatikus volt számukra.
RoboCup Rescue League Legjobb kültéri szállítórobot
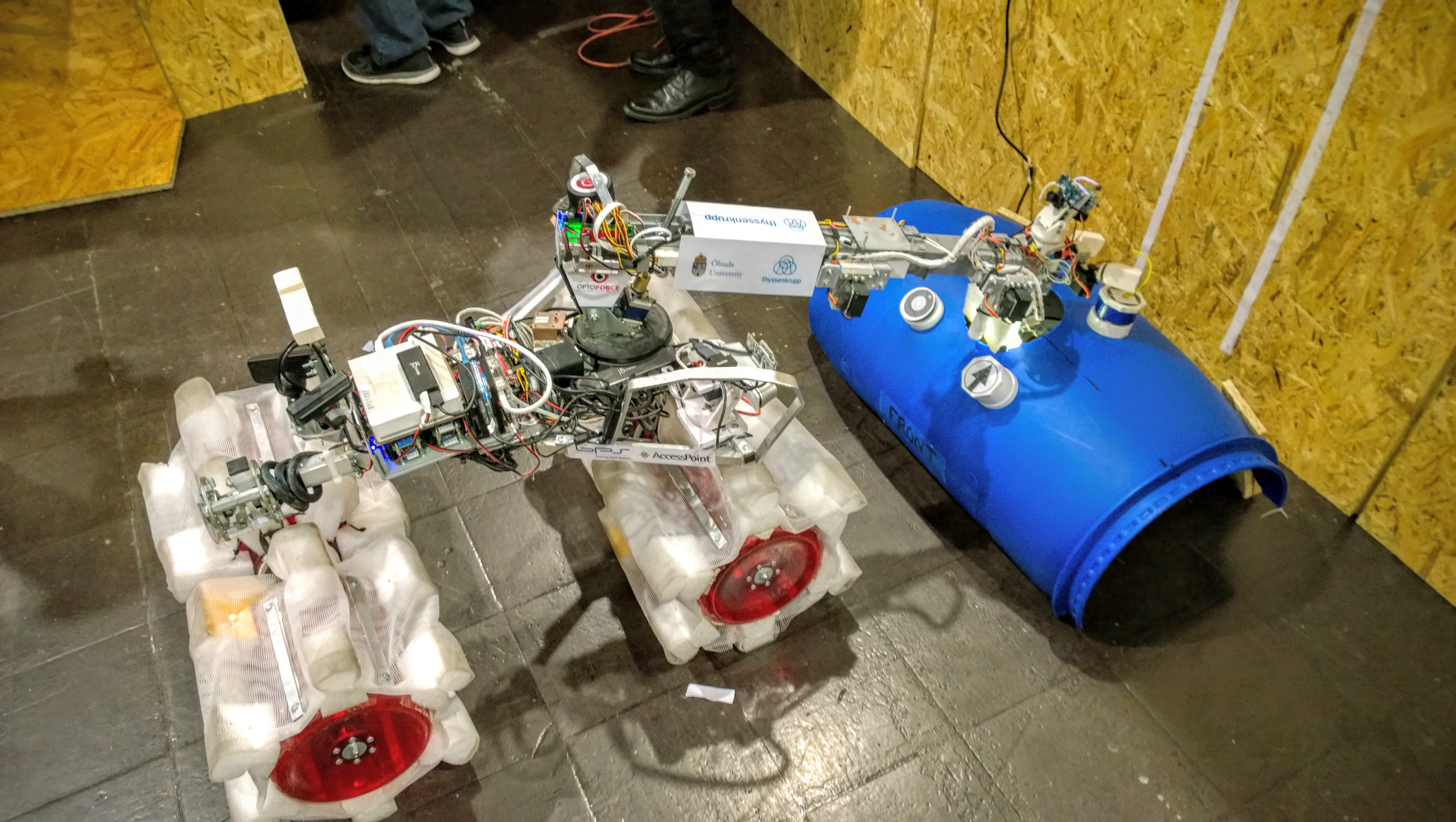
A frissen indult, hiánypótló kategória (Best Outdoor CarryBot) a veszélyes bevetések támogatását szolgáló robotok megmérettetésére vállalkozik. Pontos GPS-követésünk valamint robotunk sebessége, teljesítménye és vontatási képessége lehetővé tette, hogy magas pontszámmal hozzuk el az első díjat. Ezt a feladatot ráadásul a beltéri robotunk ötletes módosításával oldottuk meg, hiszen a rendelkezésünkre álló erőforrásokat egy robot fejlesztésére fordítottuk és speciális kerekekkel sikeresen meg tudtuk oldani a kültéri és beltéri feladatok közötti gyors váltást.
RoboCup Rescue Robot League: összetett 9. hely
Az új Rescue League szabályok szerint a robotok 20 különböző próbatételen mutathatják be képességüket, és a puszta mérésen túlmenően a szervezők próbálják irányítani is a fejlesztést, hiszen a lécet minden próbánál nagyon magasra teszik, hogy a gépek és a csapatok valóban határon teljesítsenek.
A 20 lehetséges próbatétel közül idén 5 kötelező szám mellett további 10-et szabadon választhattak a csapatok. Az összetett pontrendszer és időbeosztás miatt a verseny során a csapatok számára nem volt áttekinthető a verseny állása, minden csapat saját képességeit próbálta a lehető legjobban bemutatni, és a pontozás közzététele már végeredményt hirdetett.
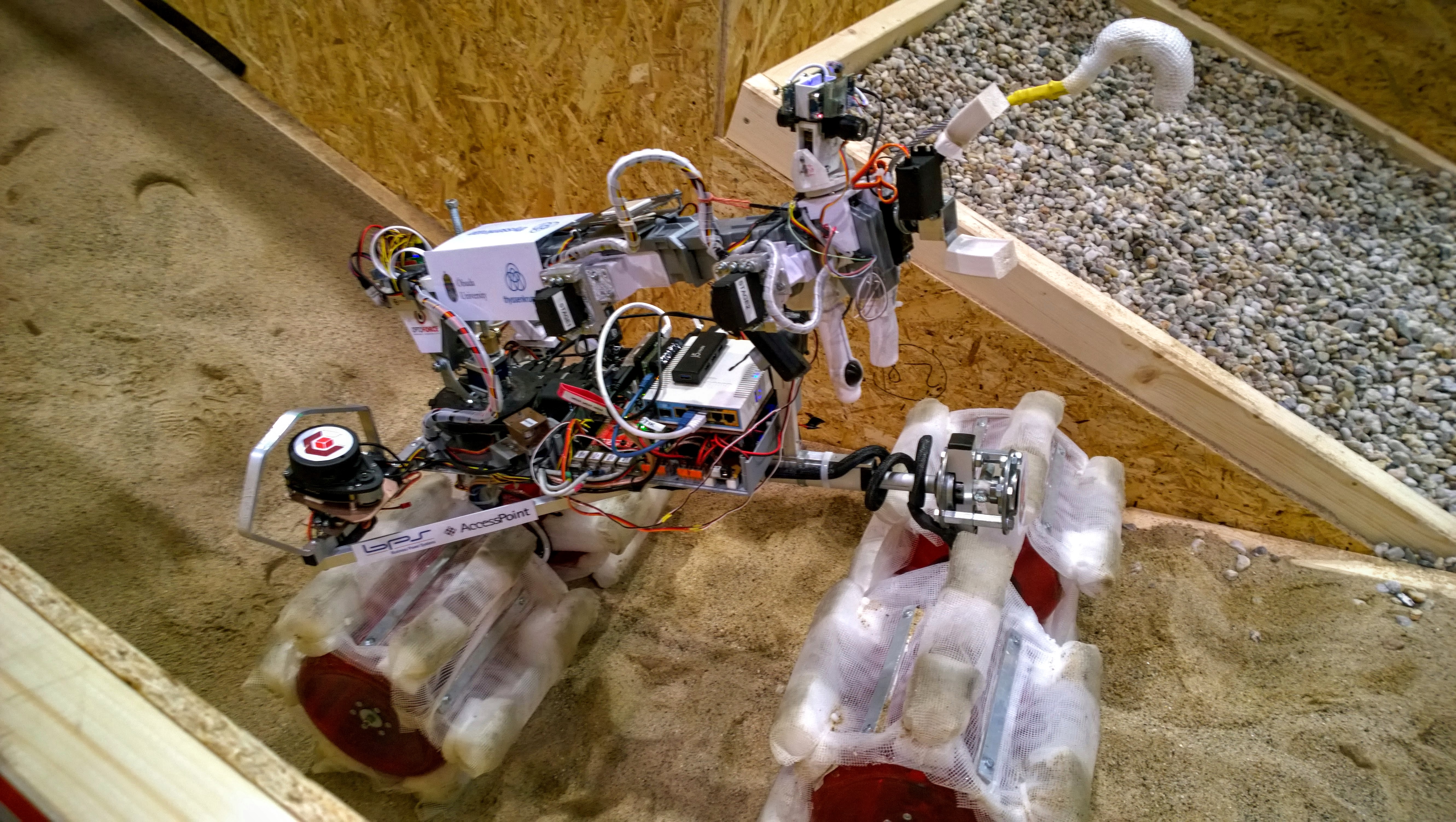
19 robot mérte össze tudását, a világ legnevesebb műszaki egyetemeiről, és nagyon büszkék vagyunk rá, hogy ilyen jól sikerült helytállnunk ebben az extrém tesztkörnyezetben. Prototípus-robotunk a tesztek és futamok során több mint 20 órás terhelést viselt el tűrőképességének határán, és ezt komolyabb meghibásodás nélkül tűrte. Természetesen ez a hazai folyamatos tesztelésnek és előrelátó tervezésnek az eredménye.
Box-utcai felkészültségünkre jellemző, hogy más csapatok rendszeresen kértek szerszámokat, szívességeket, és mindig tudtunk segíteni nekik. A mexikói UpRobotics és az egyesült államokbeli BSM RKRS csapata is megköszönte hozzájárulásunkat eredményeikhez.
Helyezéseink a különszámokban:
- Best in class Dexterity (robotkar ügyességi feladatok): 7. hely
- Best in class Mobility (terepmászási képesség): 4. hely
- Best in class Exploration (felderítés): 6. hely
Próbatételek
A Rescue League célja katasztrófahelyzetben bevethető robotok készítésének inspirálása, és a gépek képességeinek megismételhető mérési módszertanának kialakítása az Amerikai Szabványügyi Intézet (National Institute of Standards and Technology, NIST) által.
A verseny megszületését az 1995-ös kobei földrengés ihlette, hiszen a földrengések során hirtelen nagyon sok ember kerül szorult helyzetbe, és nagyon kevés a szakképzett mentőszemélyzet, akiknek rövid idő alatt kell sok munkát végezni és nehéz döntéseket hozni. Ezt a munkát segíthetnék olyan – akár feláldozható – robotok, amelyek rövid idő alatt bevethetők és segítik a szituáció felderítését, javítják a túlélési esélyeket, bizonyos esetekben akár be is tudnak avatkozni.
A versenyen prototípus-gépek és jellemzően egyetemista, fiatal mérnökökből álló csapatok mérik össze ügyességüket, hogy a gondosan felépített akadálypályán minél több pontot szerezzenek. A robotok mögött gyakran tizenéves fejlesztési munka és komoly állami/egyetemi támogatás áll, így rendkívül erős mezőnybe csöppentünk. El kell ismernünk, hogy különleges robotokkal, high-tech berendezésekkel is találkoztunk, amelyekkel itthon ritkán fut össze az ember, de ilyen erős mezőnyben csak még inspirálóbb a küzdelem.
Beállási tesztek
Valamennyi futam elején a robotoknak demonstrálniuk kellett a képességeiket. Az így szerzett pontokat azután a próbatétel sikeres ismétléseinek számával szorozták, és végül normalizálták úgy, hogy az adott próbát legjobban teljesítő csapat kapott 100 pontot, a többiek arányosan kevesebbet.
A beállási teszt összetevői:
- hőkamera alapján C betű felismerése
- hagyományos kamera alapján nagy QR-kód felismerése vagy apró szimbólumok leolvasása
- hagyományos kamera képén mozgás érzékelése (több mozgó tárgy bekeretezése)
- veszélyes anyag (hazmat) szimbólumok automatikus felismerése (4-ből 3 szimbólum esetén)
- CO2-szenzorral légzés észlelése
- kétirányú hangátvitel
Ügyességi tesztek:
- tollal 1 cm átmérőjű körbe beletalálni
- cső belső falán látható vonalak megszámolása
- csaptelepnek megfelelő szerkezet elforgatása 180 fokkal
- elektromos aljzathoz hasonló szerkezet eltávolítása a helyéről
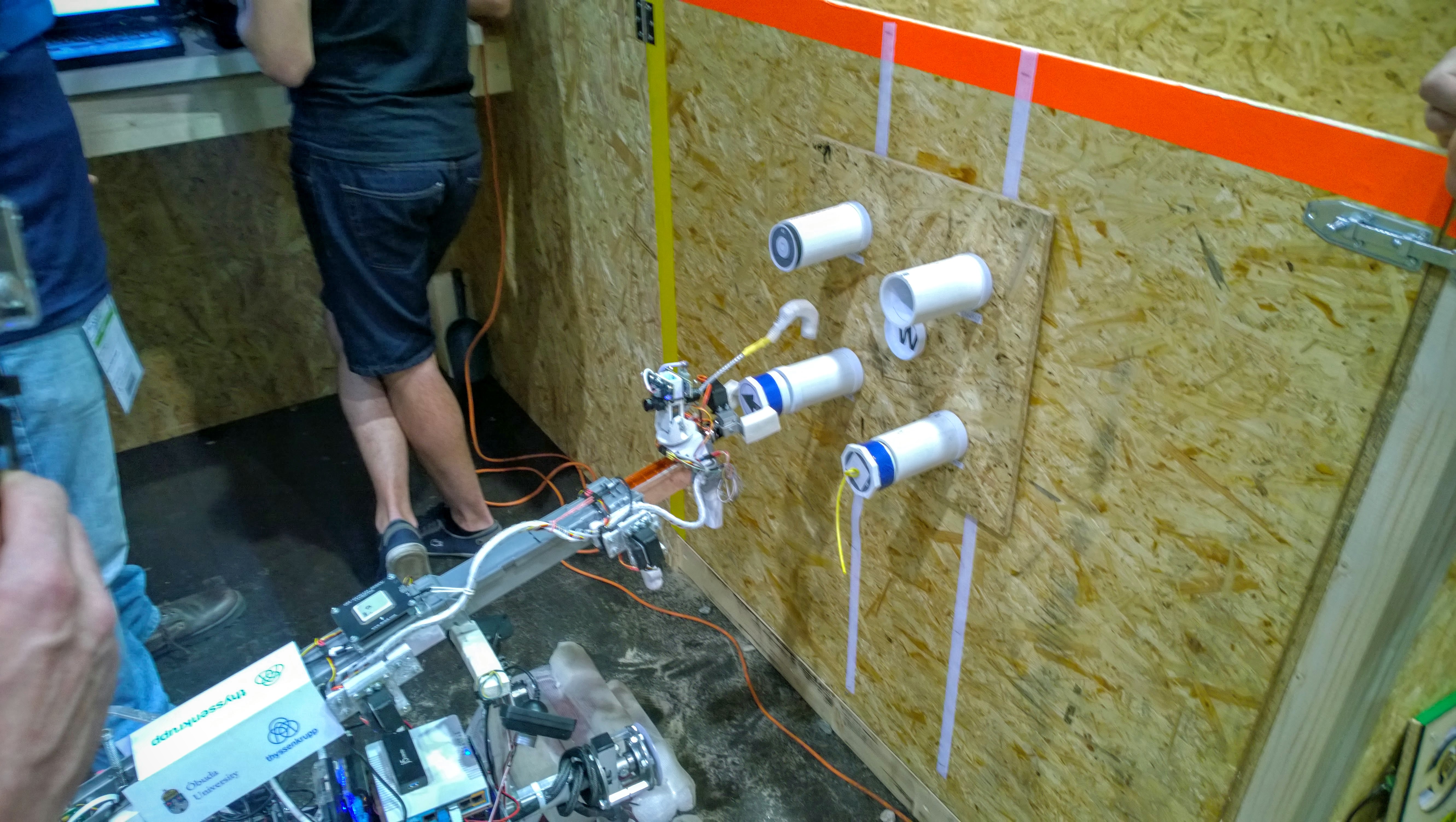
Büszkék vagyunk rá, hogy házi eszközökkel készített robotkarunk segítségével valamennyi ügyességi tesztet sikeresen teljesítettük, és a szenzoraink illetve szoftveres funkcióink révén majdnem minden beállási tesztünk 10 pontos (maximális) lett. Ez többek elismerését is elnyerte, hiszen a lényegesen többe kerülő eszközeik is csak 7-8 pont környéki eredményt hoztak.
Bár a próbáknak, megoldásoknak, és nehézségeinknek külön posztot is szánunk, az oda-vissza többször elvégzendő feladatok rövid leírása álljon itt:
Manőverezési feladatok
Az egyszerűbb precíz mozgások mérését célzó mérések
MAN1: A robot átlójához igazított szűk folyosó középvonalán haladás
MAN2: A robot szélességéhez igazított sínen egyenesen végighaladás
MAN3: Döntött csúszós 30 fokos rámpán átlós közlekedés
MAN4: 15 fokos rámpákból álló akadályokon közlekedés
MAN5: döntött karók közötti akadálykerülés
Mobilitási feladatok
A romos épületekben a robotoknak extrém tereppel kell szembenézniük.
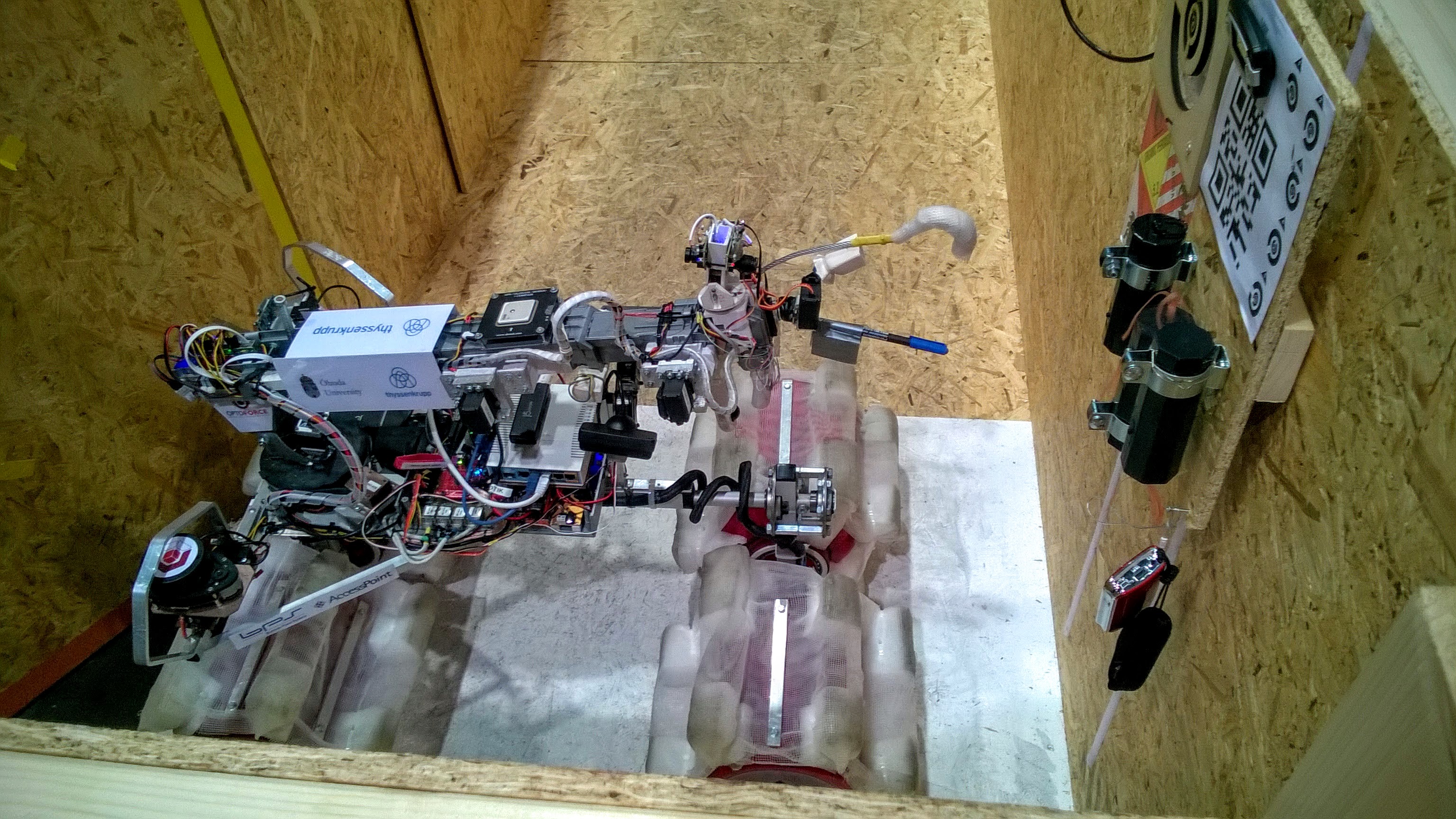
MOB1: Csúszós, szabadon forgó PVC-csövekből álló akadályok megmászása
MOB2: Homokos emelkedőről sóderes lejtőre mászás
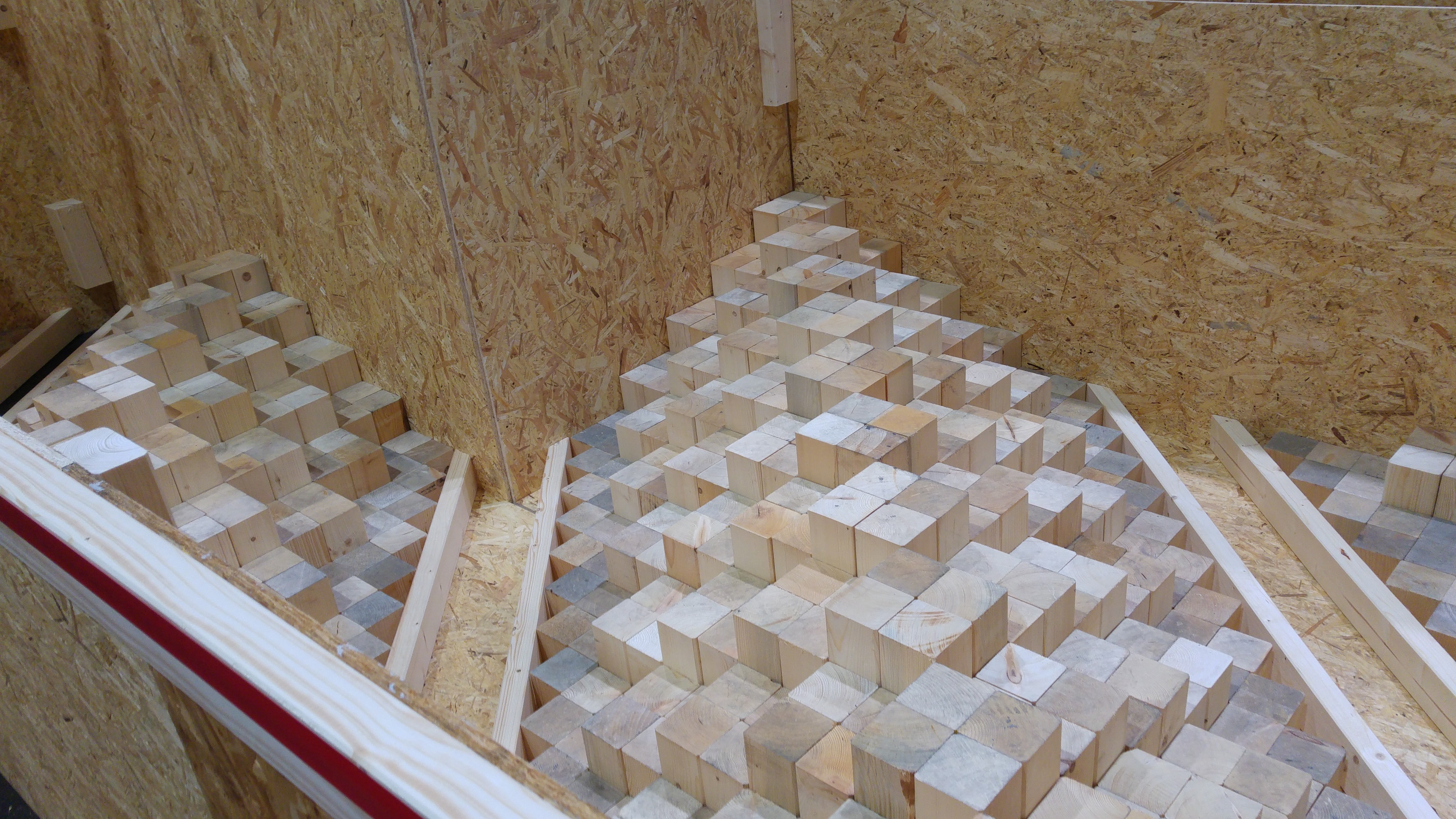
MOB3: Függőleges fagerendából épített nehéz domborzat
MOB4: Emelt sík felületű rámpák
MOB5: Romos lépcsők, keresztben gerendákkal

Ügyességi feladatok
Az emberi test nagyon jól hangolt magas szabadságfokú univerzális gép, a robotok számára azonban nagy kihívás az emberi kéz ügyességét utánozni vagy pótolni.
DEX1: Beállási teszthez hasonló párhuzamos csövek változatos helyzetben rögzítve
DEX2: Beállási teszthez hasonló csövek csillag alakban változatos helyzetben rögzítve
DEX3: Beállási teszthez hasonló feladat hordó belsejében és annak külső felületén elhelyezve
DEX4: Jobbra és balra nyíló ajtók kinyitása kilincs lenyomás után, tolással és húzással
DEX5: Farönkökből dúc építése (sérült épület alátámasztási technika)
Felderítési feladatok
A menekítő robotok egyik fontos feladata, hogy a kezelő személyzet számára a lehető legpontosabb információt szolgáltassák a lehető legkevesebb beavatkozás mellett.
EXP1: Folyamatos rámpán térkép készítése
EXP2: Nehezített rámpán térkép készítése
EXP3: Térkép készítés közben szimbolumok, tárgyak felismerése
EXP4: Szakadék felismerés és elkerülés (teljesen autonóm robotok számára)
EXP5: Akadály felismerés és elkerülés (teljesen autonóm robotok számára)

Kültéri feladat
Az Outdoor CarryBot versenyszámban kültéren kellett a robotnak hasznos terhet mozgatni egy kerékpár utánfutón, vonalkövetéssel vagy meghatározott GPS koordinátákkal megadott útvonalon 2 méternél nem nagyobb eltéréssel. Robotunk differenciál GPS segítségével néhány centiméter pontossággal tudja a célpontokat érinteni, és a robusztus menekítőrobot váz a nagyméretű kültéri kerekekkel lehetővé tette, hogy nagy sebességgel többször is megtegye a versenytávot, sőt versenyen kívül tesztelve azt tapasztaltuk, hogy akár 100 kg tömeg mozgatására is alkalmas lehet.
Új kihívások
A napi 5x versenyzés a csapat számára is nagy megterhelés volt, és minden futam során rengeteg tapasztalattal gazdagodtunk. Az elkövetkező hetekben összegyűjtjük a tanulságokat, és már készülünk is a következő szezonra.
2017-ben Japánban rendezik a világbajnokságot, ahova a németországi RoboCup German Open versenyen kvalifikálhatunk, de eredményeink miatt úgy néz ki a tavasszal Thaiföldön megrendezendő ázsiai fordulóra is meghívnak minket a szervezők, tehát ha minden jól alakul három versenyünk is lehet jövőre, ehhez azonban még magasabb szintű felkészülés szükséges, mint idáig, és továbbra is számítunk támogatóink segítségére.
Köszönetnyilvánítás
Sikereinkben partnereink és támogatóink segítsége is meghatározó tényező, így meg kell ragadnunk az alkalmat, hogy megköszönjük segítségüket:
- A Thyssenkrupp Presta Hungary Kft., hazánk egyik legnagyobb autóipari beszállítója nagyvonalú támogatásával közvetlenül a versenyen való részvételt tette lehetővé a csapat tagjai számára, hiszen a fiatal mérnökök által pozitív célú robotikára fordított energia illeszkedik a vállalat által fontosnak tartott értékek közé
- Az Óbudai Egyetem büszkén támogatja hallgatóit szakmai megmérettetéseken itthon és külföldön is, így a Rescube-csapat Neumann János Informatika Kar és Kandó Kálmán Villamosmérnöki Kar hallgatói számára a nevezést is segítették, és egy mikrobuszt is rendelkezésünkre bocsátottak.
- Az Óbudai Egyetem keretein belül, de külön szervezeti egységként működik a Bejczy Antal iRobottechnikai Központ, amelynek kreatív műhelyében a Rescube csapat 2016 robotjának fontos alkatrészei készültek.
- A versenyen tapasztalható rádiós káoszban az Accesspoint.hu által biztosított eszközök és szakmai támogatás biztosította a megbízható kapcsolatot a robot felé, gyakorlatilag csomagvesztés nélkül.
- Az Optoforce.com által fejlesztett innovatív szenzorok lehetővé teszik a finom, precíz erő- és nyomatékmérést, hogy a robotkar se a megfogott tárgyban, se magában ne tegyen kárt szorítás által.
- A BPS Kft. által biztosított szünetmentes áramforrás révén leállás nélkül tudtuk működtetni az operátori állomást még a kültéri feladatok során is.
- Köszönjük az Endrich Magyarország segítségét, akik gyorsan tudtak számunkra CO2-érzékelőt biztosítani, amikor arra szükségünk lett
- A Weisz Műanyagipari Kft. és a Knüppel Csomagolástechnika Kft. termékei felhasználásával készítettük el robotunk kerekeit