Of course disaster recovery is a hot topic in Japan and they are keen in robotics, so this is a natural place to organize such a worldwide event.
Since this years RoboCup German Open, we’ve made our arm more dexterous, and rebuilt the robot to be more modular, maintainable and transportable.
Let’s meet our friends from Australia, Austria, Germany, India again and hope to get new friends from Japan too!
We might revisit WRS2020 when they will organize the robotics competition aligned with the Olimpics 2020. The disaster robotics challenges will be held at a testing replica of the Fukushima nuclear power plant.
Check out our WRS 2018 promo video: like, subscribe and share!
Rescube visits World Robot Summit 2018 in Japan September 8th, 2018Péter Kopiás
We’ve visited the RoboCup German Open 2018 held in Magdeburg, Germany, that is the only european round of RoboCup Major Rescue League.
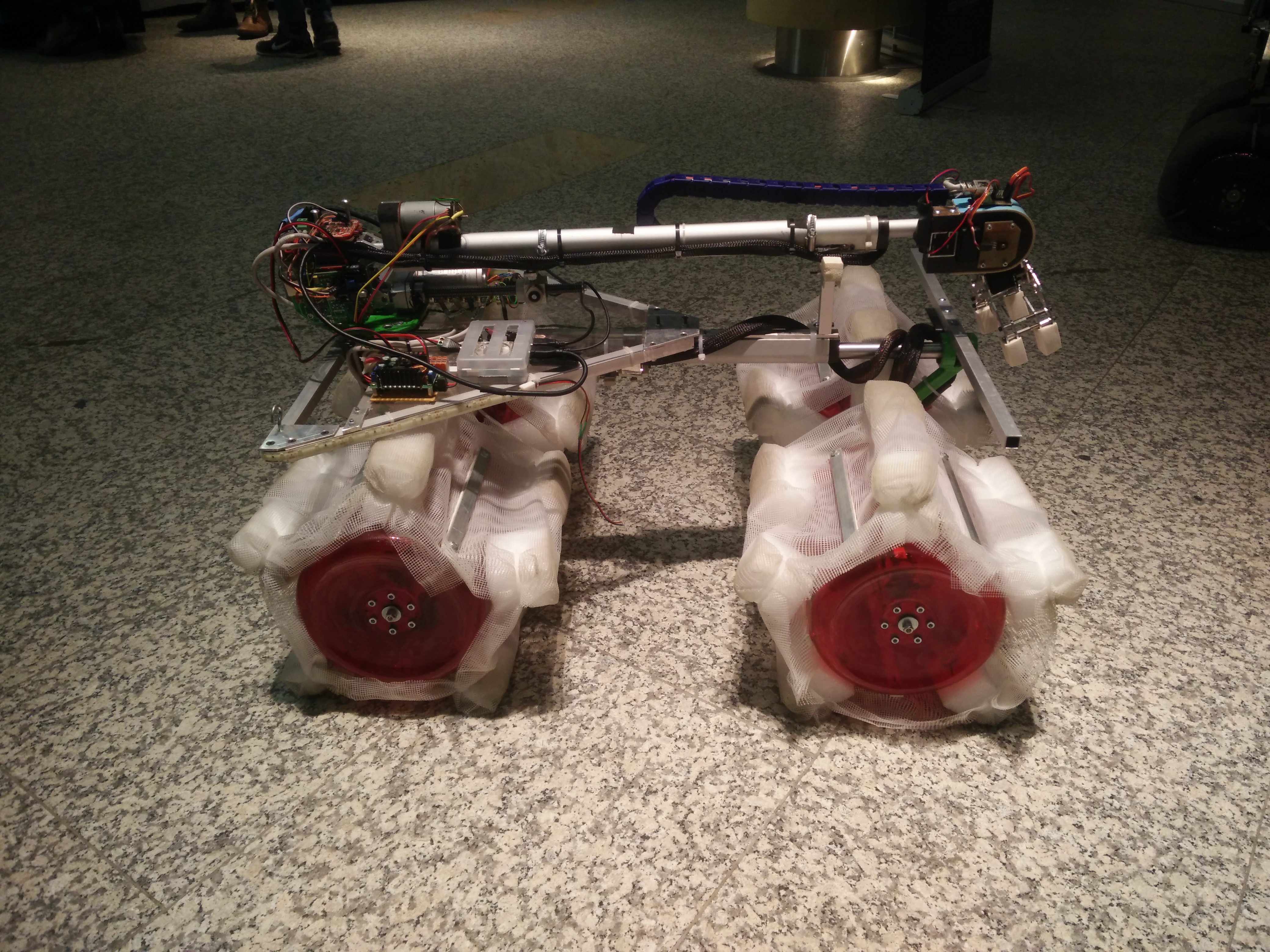
Our latest robot called “R18”, is similar to the last two years competition robots, but it’s built from ground up, and we’ve made a lot of enhancements along the way:
– the arm is more precise, lighter, stronger, longer and it has a larger workspace (at the same time!)
– we’re using more cameras, more viewpoints, with better image quality, and we’ve reduced the network bandwidth when driving
– cleanup of the upper deck resulted in more free space for the arm, and the height of the robot is reduced
– onboard processing power increased
– lower total weight
– wheels got more grip and they are more durable now
– multiple operator helper / automatic features
– little tricks here and there
– more aesthetically pleasing appearance
We’ve spent a lot of energy on the development, and it worth it, as Team Rescube scored:
– Best in Class Mobility: 1st place
– Best in Class Dexterity: 1st place
– Best in Class Small Size Robot: 1st place
– Overall Rescue League: 2nd place
Lots of Awards
Out Robot worked flawlessly from day one, reliably scored points even on the most challenging terrains and during the most complex dexterity tasks. The whole week went down without repair!
The success of our small delegation – Zoltan Abonyi, Matyas Borvendeg and Peter Kopias – of course is built on the work, help and support of our friends, family and team members still in Hungary, or around the world. Thank you for your enthusiasm and efforts!
Here’s the short summary video we’ve compiled, showing the robot on simple, and more challenging terrains and solving the dexterity tasks:
Oh, and here’s a surprise link to the World Robot Summit with a Disaster Recovery robot competition to be held in Tokyo this October. Watashi wa hotondo nihongo o hanasemasen.
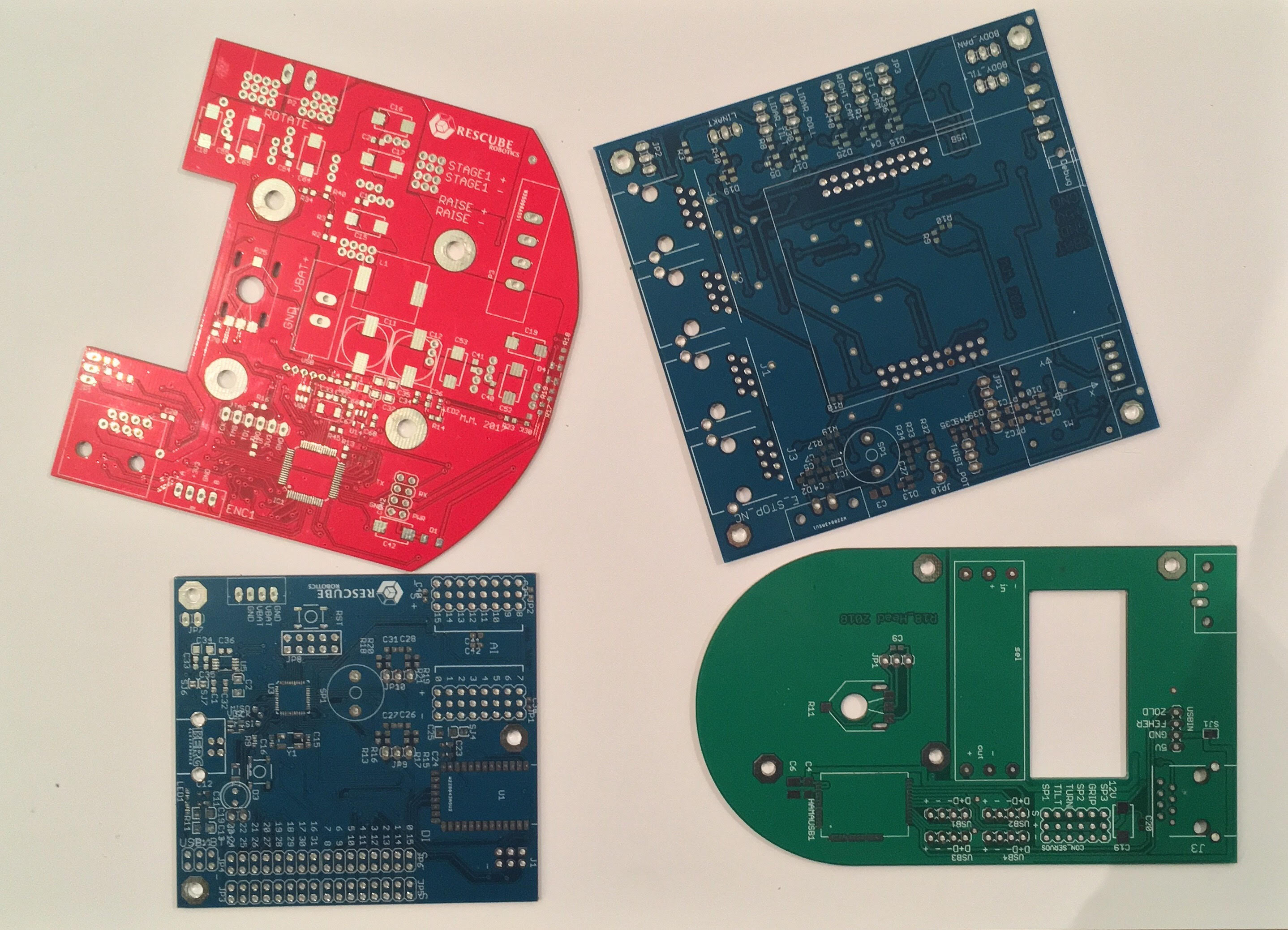
The boards:
– Integrated Arm Controller (top left): contains motor controllers, encoder inputs and an ARM Cortex M4 microcontroller, that handles the arm and gripper movements
– Body shield (top right): this panel is an extension board that connects the body devices to the body microcontroller. Features include: I2C for accel/gyro/magnetometer, CO2 sensor, 4 wheel motor control, spine length control and battery monitoring.
– custom USB HID device (bottom left): featuring 15 analog, 1 encoder, 32 digital channels, with integrated microcontroller
– head distributor board (bottom right): this panel contains a switching power supply for the gripper motors, a servo hub and a USB hub in a compact form factor.
Hope to get all these working next weekend, and get the new arm and body platform started.
We’ve been very busy at the end of last year. As you might have heard, after our visit to Enrich, some of us have entered and later won the IAEA Robotics Challenge – with our Unmanned Surface Vessel.
Of course while that spin-off took some time from us, we’re still on track with the Search and Rescue robot, and we’re heading to Magdeburg, Germany to meet our friends at the RoboCup German Open 2018
We’re rebuilding the R18 robot similar to the previous one, but with more refined parts and tuned software.
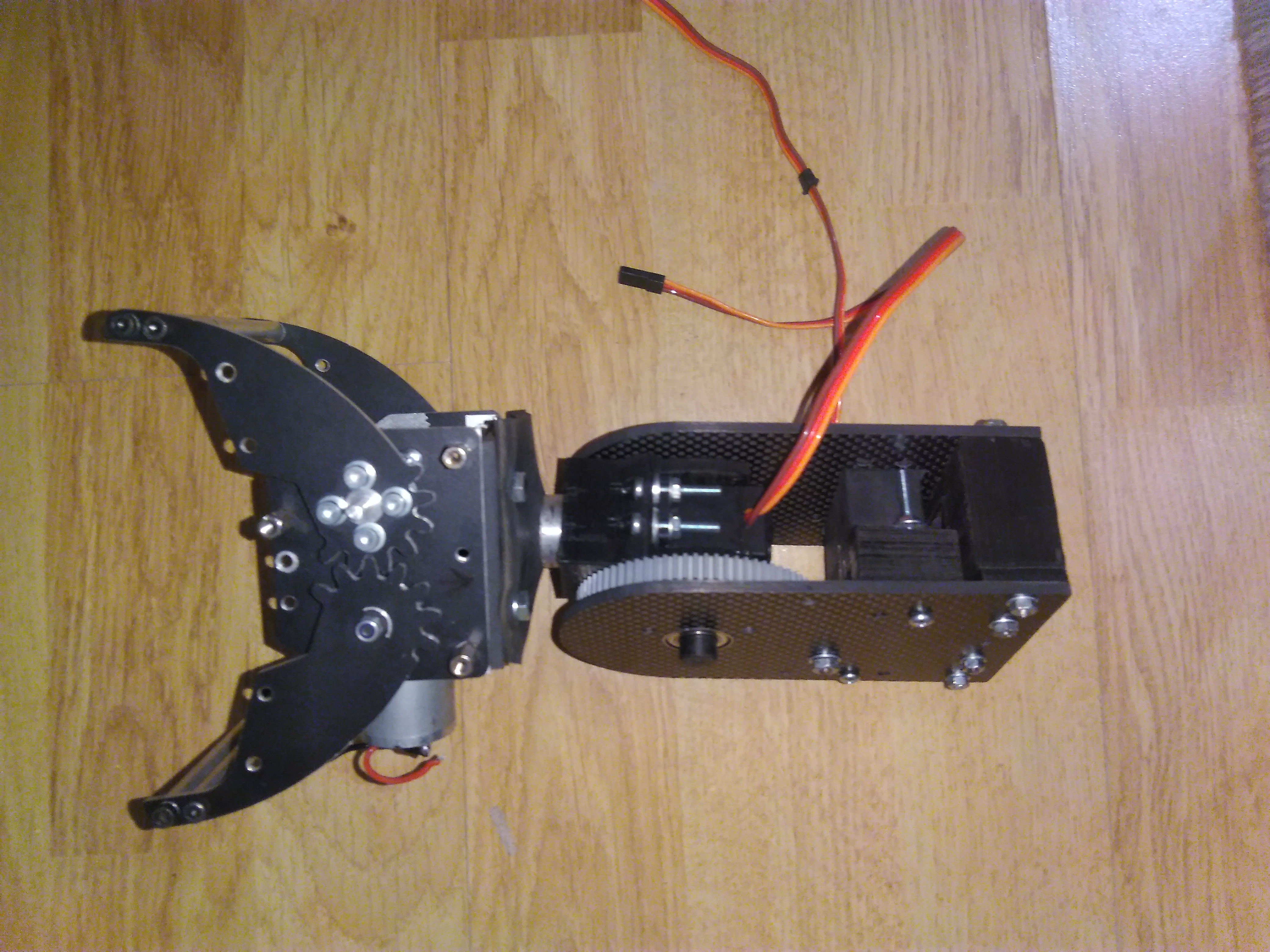
Have a look at the new gripper that’s much more compact and lightweight than in 2017, and it’s also stronger at the same time.
Compact gripper for the R18 robot arm.
As we don’t have the resources to visit the RoboCup WorldCup in Canada this year, we will focus on the German Open, and aim at the RoboCup WorldCup of 2019 (Sydney).
If you are interested in building robots with us, drop us a line here in the contact box, and let’s have a chat.
As some of you already know, we’ve participated in the Enrich – First European Robotics Hackathlon where our R17 robot had to measure radiation, map the building and collect some live radiation sources from the reactor room of the Zwentendorf Nuclear Power Plant.
We had a great time preparing for the three missions, while we had to solve issues ranging from wireless networking through concrete walls to installing new sensors and the Rubedo CVM computer vision module on the robot.
The following video shows one of our two runs with live cobalt-60 isotopes, beginning with the 40 meter lift, and contains both external views and some operator video content.
It was extremely inspiring, that we met with the ladies and gentlemen from both research and industry who built the most capable robots you could send in when the time has come. This was the most realistic incident situation one could imagine.
The organizers from Austrian Armed Forces, EVN, Fraunhofer FKIE and European Robotics made very serious efforts to handle the participants, the visitors and the isotopes very professionally every day, and made sure everyone is safe and can work efficiently through the whole event.
This year was the second time National Instruments organized the Science No Fiction Festival in Debrecen, Hungary.
We were invited to demo our robots again and got some new friends again.
Who would have thought that the most popular feature of the robot is the Flir Lepton camera with the waving gripper? 🙂
All the kids liked it, and even the very small ones smiled when saw the robot waving at them. 🙂
Of course while we were there, we used our time to prepare for this years RoboCup competitions (Germany, Japan), and our R17 robot get it’s arm attached and tested.
It’s a very important issue to get the kids interested in STEM fields, and we try to inspire the next generation to learn about robotics.
Our calendar has a few upcoming events too:
– 23th february We’ll be at the University of Pécs, giving a talk on Pollack Expo
– 2nd march We’re invited for a demonstration about robotics in Hungary at Trafo
– 25th march Magyarokamarson.hu is the competition most of Rescube members met, so we’re always happy to support the event
– 31st march – 1st april The Drone & Robotics Show will visit Sopron, Hungary and we’ll display our robots again.
We had a great time @ Science No Fiction February 11th, 2017Péter Kopiás
We’re very proud to present you this gift we received from our #1 fan, Peter Domonkos!
This led display is one of a kind, handcrafted plexiglas with a 3d printed base.
Can you believe, that this IoT device has wifi connection via an ESP8266 module, and you can set the colors through a REST API? It’s absolutely mindblowing.
This gift is the result of hours of dedicated work, that means very much to the whole team!
Hope to see you in Debrecen this weekend!
A gift from our friend Peter February 1st, 2017Péter Kopiás
It’s about that time of year, when we’ve rolled the first meters with our prototype robot at the Science NO Fiction festival last year. That prototype became the Design Award winner at the RoboCup WorldCup 2016 in Leipzig.
We’re already preparing for this two day event, and we’ll efficiently use our time together to work on our 2017 prototype already.
Of course you can meet with the 2016 competition robot and we will talk about the competitions we’ve been to, and we’re going to.
See you in Kölcsey Központ, Debrecen on teh 4-5th of february.
There was a special occasion at the Drónverseny és Robotika Show this Saturday: this was the first time we presented to the public our robot that won several awards at the 2016 RoboCup world championship. Young and old both gathered around our stand to watch our robot in move for the whole day – except when it was part of our presentation on the main stage, had to show up at a press conference or when the guys prepared it in our pit-stop.